“手術時間一長,醫生難免會手抖。手術機器人能夠過濾抖動,避免給患者帶來的威脅。”北京和睦家醫院醫生朱剛坐在電腦邊,回放自己操作達芬奇機器人完成的手術:兩只微型機械臂從腹部小孔進入患者腹腔內,切除腫瘤。
與完全自動化的工業機器人不同,達芬奇依然需要醫生來操作。患者躺在手術臺上,朱剛坐在機器人控制臺上,緊盯著成像系統,這個系統可以清晰地將手術部位放大數倍,左右手分別操縱著控制臺上的兩個手柄,再輔以腳下的控制踏板,指揮機械臂完成手術。
自1996年問世以來,在過去20年的時間里,達芬奇經過幾代更迭,一度成為醫療機器人的代名詞。如今,更多類型的機器人開始出現,在各個醫療環節輔助醫護人員更好地完成工作。
目前的醫療機器人市場中,歐美企業占據了主要的市場份額。中國醫療機器人仍處于研發或臨床試驗階段,還未實現醫療機器人產品規模化,在醫療機構的普及率也較低,但正努力趕上。
手術機器人先行
早在1985年,美國洛杉磯醫院的醫生在Puma560工業機器人輔助下完成了神經外科腦部活檢手術,這是首次將機器人技術運用于外科手術中。
此后醫療機器人發展出諸多種類。北京航空航天大學機器人研究所王田苗院士曾撰文介紹,將已經上市的醫療機器人按照功能和用途分為若干類,包括神經外科機器人、骨科機器人、腹腔鏡機器人、血管介入機器人、假肢和外骨骼機器人、輔助康復機器人、醫院服務機器人和膠囊機器人等。
達芬奇是商業化最為成功的醫療機器人之一,主要用于心臟外科、泌尿外科、胸外科、肝膽胰外科、胃腸外科、婦科等相關的微創腹腔鏡手術。和睦家醫療CEO李碧菁早年參與將達芬奇引入中國。她告訴《財經》記者,截至2016年二季度,全球已經配置達芬奇超過3700多臺,其中2474臺配置在美國,歐洲和亞洲緊隨其后,完成手術數百萬臺。
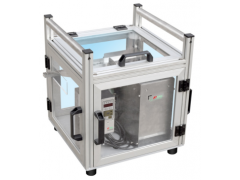
達芬奇機器人由三部分組成,醫生操作系統、三個器械臂和一個鏡頭臂組成的床旁機械臂系統、三維視頻成像系統。在手術過程中,朱剛只需要操作手柄,控制機械臂進入腹腔中進行手術;成像系統提供如同開放直視效果的高清三維手術視野,幫助他進行判斷。
朱剛和很多外科醫生能夠舉出達芬奇的一系列優點。在機器人輔助下,醫生可以坐著進行手術,舒適的坐勢有利于長時間復雜的手術,是對醫生身體的解放。北京理工大學智能機器人研究所博士李浩源介紹,機器人的操作精度由計算機控制,從而過濾因勞累導致的醫生手部抖動,減少手術風險。
在機器人協助下,朱剛一個人就可以完成此前一整個電視腔鏡手術團隊的大部分工作,可以節約更多的人力。
此外,醫生借助機械臂進入腹腔進行手術,避免與患者的直接接觸,減少感染風險;而且手術切口較小,患者恢復時間自然更快。
截至目前,中國已經配置60臺左右達芬奇機器人,主要分布在一線城市和大型醫院。由于大型設備采購監管放開,一些沿海發達地區省會和地市級三甲醫院也正計劃采購手術機器人。
朱剛自己經歷過腹腔鏡手術對開放式手術的替代,從而對機器人手術頗為看好。在他看來,只要對機器人的操作熟練,可以把更多的手術交給機器人來完成,同時,醫生能夠不斷提升手術速度和精度。“我們現在使用機器人進行前列腺癌手術,耗費時間少于開放式手術。”他說。
李浩源指出,腹腔鏡手術機器人一枝獨秀有其特殊性,腹腔內部器官生理解剖知識積累較多,腹腔內部相對活動空間加大,承受機器人外部干預幅度較大,風險相對較小。
主要針對腦部的神經外科機器人恰好形成鮮明對照。王田苗指出,“目前上市的神經外科機器人大多采用術前醫學圖像導航的方式對機器人進行引導定位,腦組織在手術過程中會因顱內壓力變化而發生變形和移位,不可避免地引起定位誤差。”而腦組織太脆弱,不能承受過度的外部侵入,誤差意味著風險。因此,神經外科機器人在輔助手術操作過程中,需要醫生結合醫學影像反復調適,成為一個需要突破的瓶頸。